

The song used in this video is “Fight Club” by Evil Bear Boris.
My Patreon supporter(s) for more than $5 for the month of July were: Turnabout Akamia. Thank you so much!
My supporters on Patreon contribute additional funding that allow me to build up and improve this channel and to make more videos. If you would like to help, you can support me here: https://www.patreon.com/builderdude35
Hello! Today I am going to be sharing with you my EV3 recreation of the Krimzon Guard Security Tank from the video game Jak II. The purpose of this tank is to guard the Fortress from intruders, and it does so in complete overkill fashion, with dual cannons that lock onto targets using sensors, infrared homing and a giant spiked steam roller on the front!!! To see how this tank takes security to a whole new level, continue on!
Chassis:
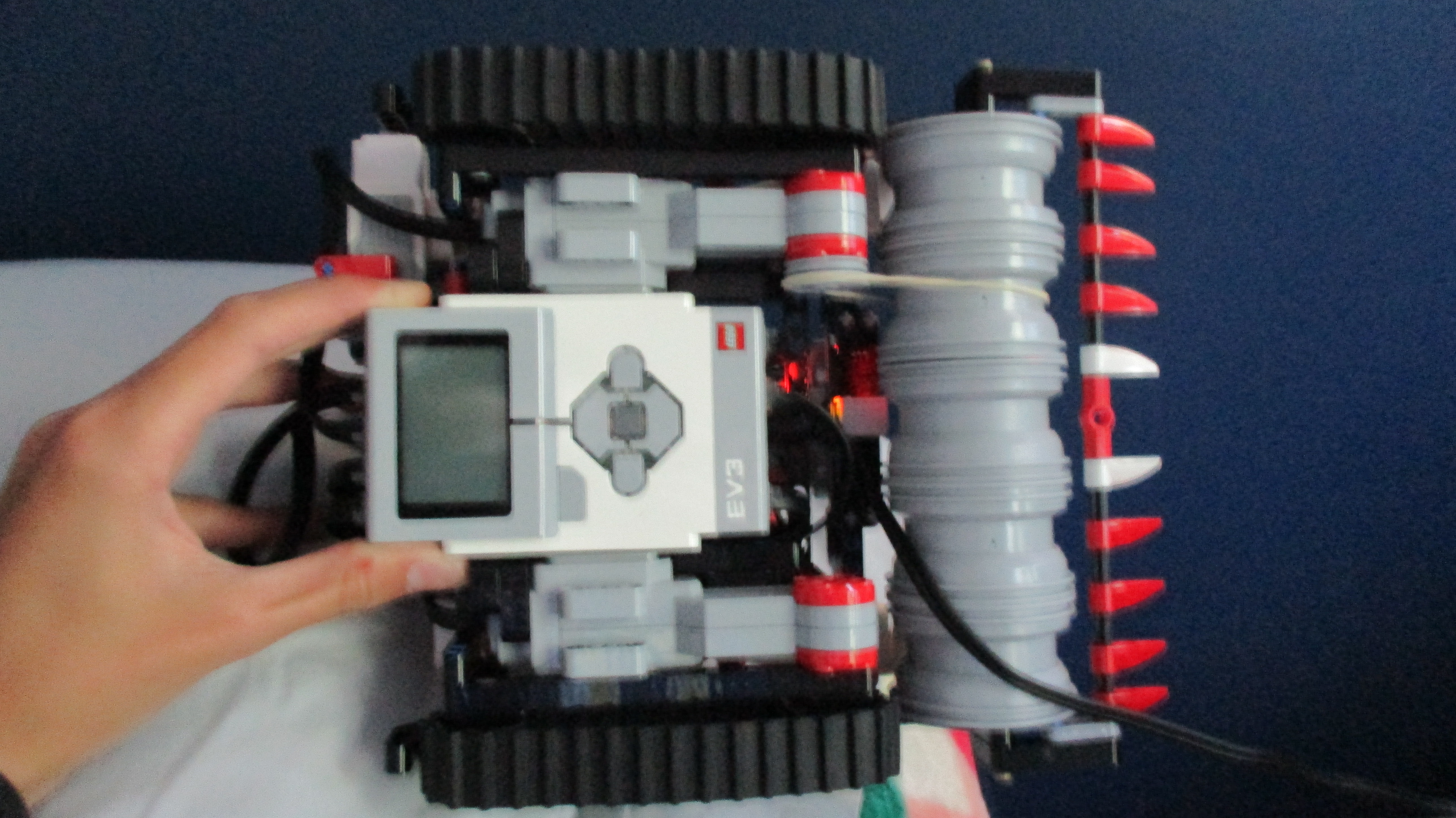
The driving of the KG Tank is pretty straightforward: it uses a simple tank setup, where each of the two EV3 Large motors controls its own track. A rubber band is driven by a pulley on one of the EV3 Large motors, which in turn makes the steam roller rotate. Lastly, the EV3 brick is mounted facing the ground, for somewhat easy access to the buttons.
Steam Roller:
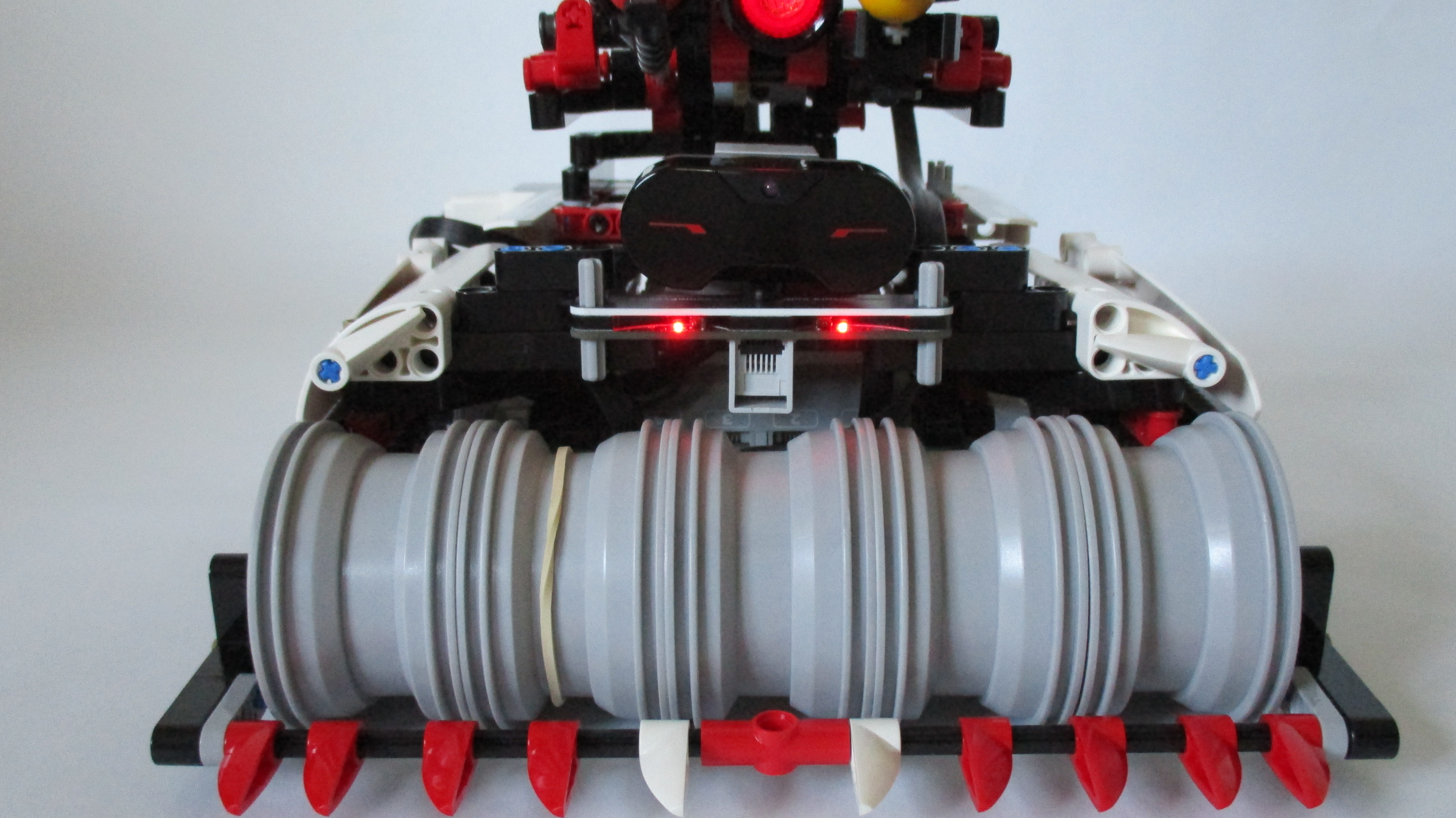
This is one of the overkill elements of the tank (well, the entire idea of using a tank for security is pretty excessive in the first place 😛 ). Anyway, in the game, the tank has a giant spinning steam roller with spikes. I replicated this with my robot by using 5 of the large grey LEGO rims. Unfortunately, the steam roller itself don’t have spikes, but there is a bar going across the front that does. And again, like I said before, the roller rotates via a pulley and rubber band on the left drive motor.
Turret:


On top of the KG Tank sits a rotating, dual-barrel turret. The two ball shooters are fired with one EV3 Medium motor and each shooter is opposed 180 degrees from the other (in other words, every 180 degrees one of the ball shooters fires, but each time it’s the opposite one). Each barrel has a magazine that holds 6 rounds. The entire turret sits atop a turntable, which is powered by a second EV3 Medium motor; this gives the tank the capability to rotate its turret to meet its target (more on that under “Programming”).
Sensors:
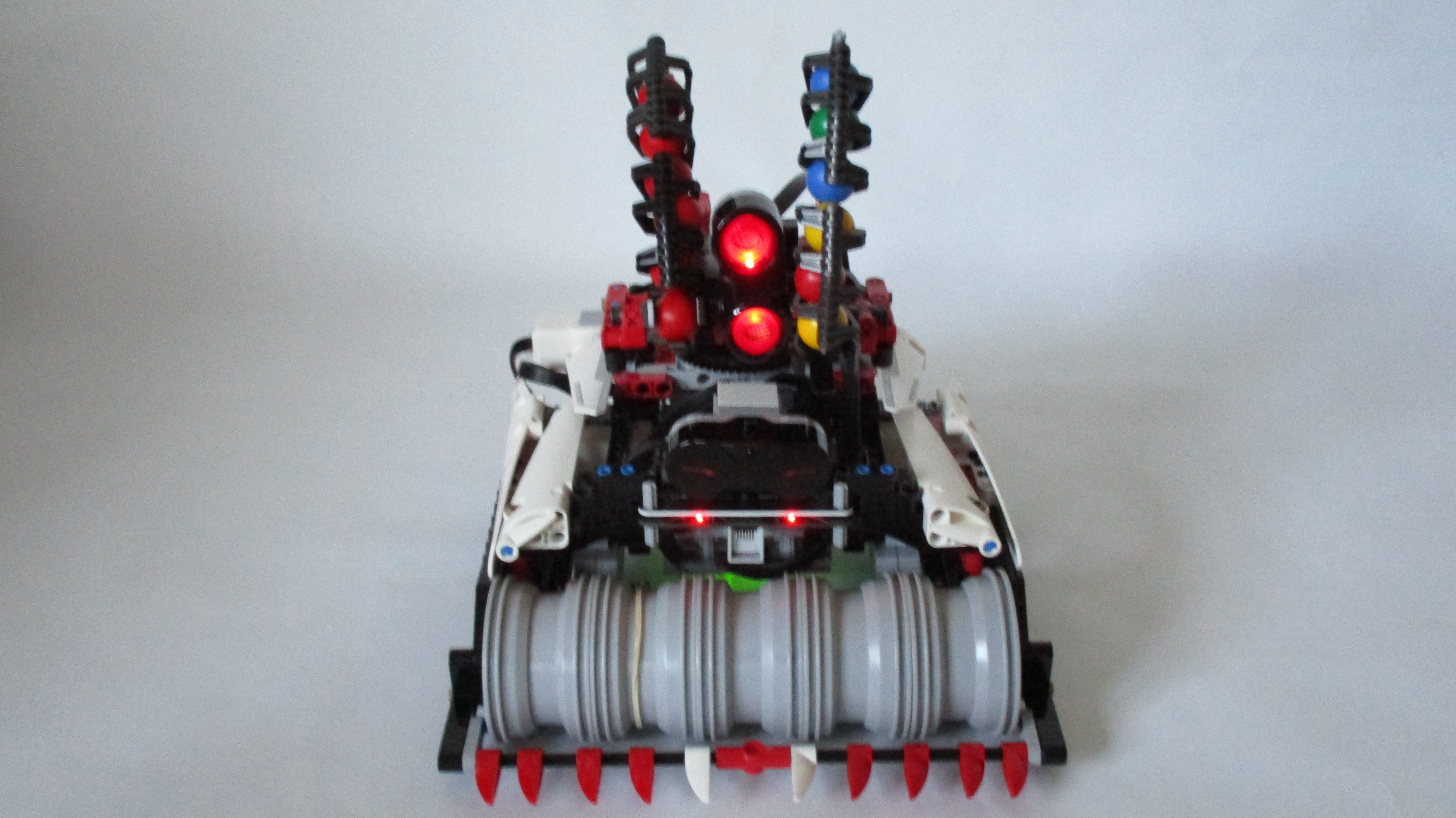
The KG Tank uses three sensors for the operation of its program. There is a Mindsensors SumoEyes mounted on the chassis just above the steam roller (you will see the two red LED’s) that detects the targets in zones left, right or straight ahead. Just above that is a LEGO Infrared sensor that is used for beacon tracking. Lastly, there is a LEGO Ultrasonic sensor that rotates with the turret to confirm target acquisition. The next two “Program” sections will tell you how these sensors are used in the program.
Program (part 1 of 2) driveControl:
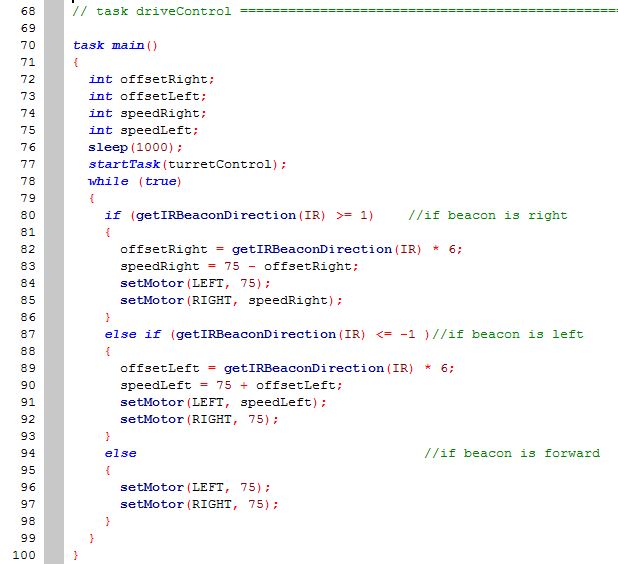
The Krimzon Guard Security Tank is programmed in RobotC (my first robot to be programmed this way). It runs one program, but the program runs two completely independent tasks, so for convenience, I gave each task its own section. The first task is called “driveControl.”This task is a proportional beacon follower that uses the LEGO IR sensor and controls the two drive motors, essentially telling the robot where to drive. The program works as follows: if the beacon is to the left, the robot turns left, and if the beacon is right, the robot turns right. Here is where the proportional part comes in: the IR sensor measures how far away the angle of the IR Beacon is from being directly ahead; the farther away from the middle the beacon is, the sharper a turn the robot will make (by way of some math calculations). So, if the beacon is just a little off center, the robot will make a slight turn, but if the beacon is all the way at the edge of the IR sensor’s vision, the robot will make a spin turn. The sharpness of the turn is completely variable in between. I have a picture of the proportional beacon follower here.
Program (part 2 of 2) turretControl:
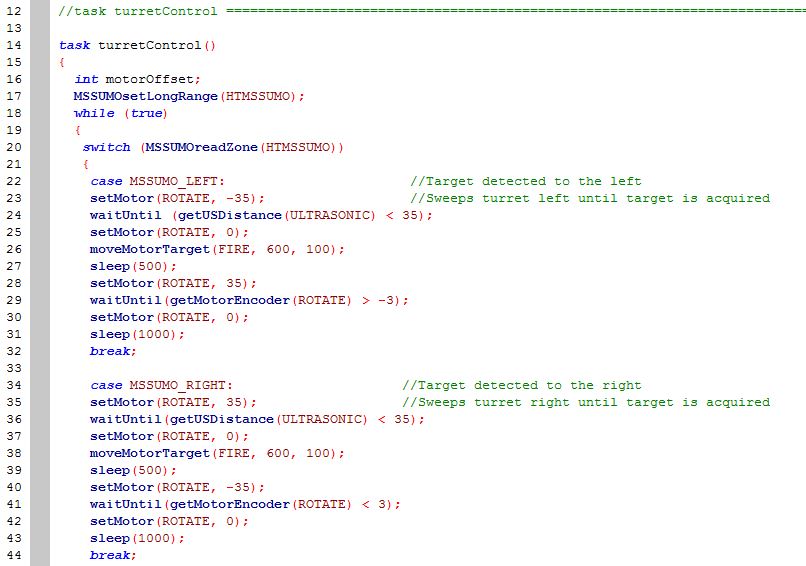
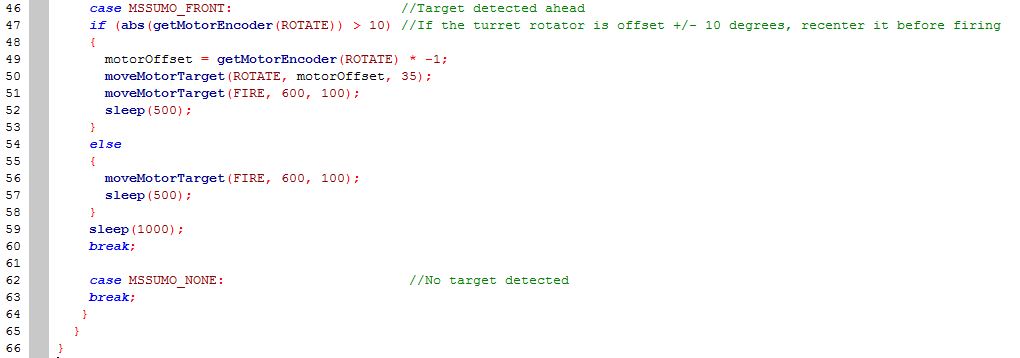
The second task in the program is “turretControl,” which uses the SumoEyes and the Ultrasonic sensor to control the rotation and firing of the turret. (Remember, these are two tasks that are independent of one another but run simultaneously in the same program). First, the SumoEyes spots a target and tells the EV3 which zone it is in (left, right or straight ahead). If the target is in the right zone, the turret will rotate right until the Ultrasonic sensor sees the target, too. Then, the robot fires two shots at the target and the turret returns to center to repeat the process with another target. If the object is left, the robot executes the same process as the right, just in the left direction. If the target is straight ahead, the robot will check to see if the turret is centered; if it isn’t, it will center the turret and then fire when the Ultrasonic sensor sees the target; if the turret is already centered, it skips the centering step. This all makes for a pretty advanced targeting system that locks onto targets and hits them with good accuracy.
Conclusion:
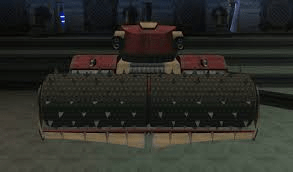
This robot was a lot of fun to build, since I don’t normally do things like this. Also, this was my first attempt at building a robot from a videogame (the “real” tank is pictures) and my first time using RobotC (I will be using it for more of my future projects). The beacon seeker works wonderfully and I really enjoy seeing the turret lock onto targets. Tell me what you think! As always, thanks for reading and stay tuned, because there are more robots on the way!