

Hello everyone! My latest robot that I am sharing with you is an update to my long-running Timmyton series. I bring to you version 5.6. From 5.5 to 5.6, there are a few updates, but since they are very similar, I will only be discussing the updates in this post; please see the Timmyton 5.5 post if you haven’t already. Anyway, thanks to a review of the Timmyton 5.5 by DamonMM2000, which outlined many bugs in the v5.5’s software, I decided to go back and fix these bugs, and a few more, and the result is the 5.6. Read on to find out what improvements have been made!
Download building instructions and programs here: https://builderdude35.com/downloads-2/
Mechanical Update
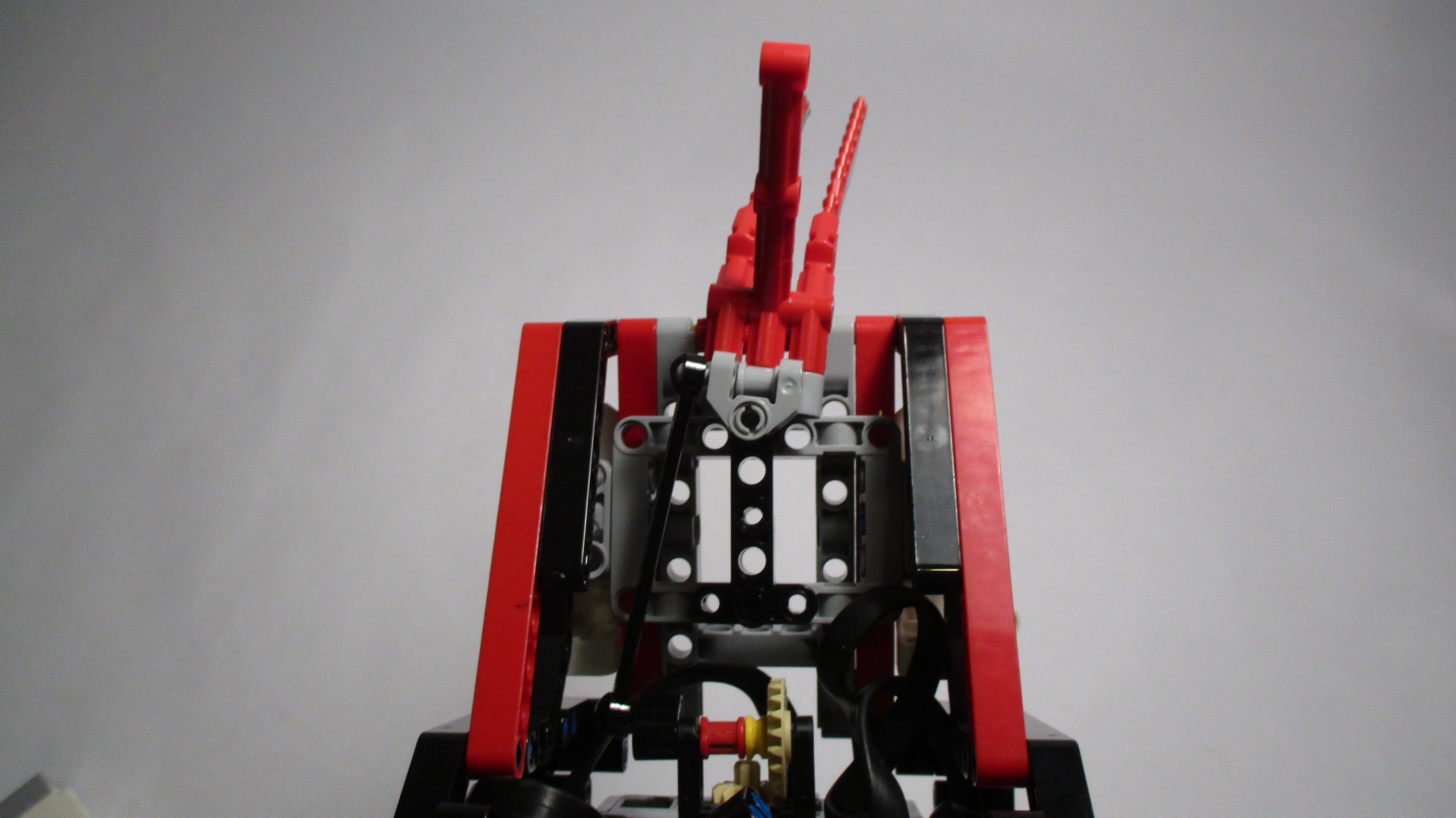
The Timmyton 5.6 is almost mechanically identical to the 5.5. The only difference is the 5.6 has a revised linkage for the track rod that moves the tail back and forth (pictured). This new design increases the range of motion of the tail. Previously, the 5.5’s tail went all the way to the right, but only came as far left as the middle. Now, the tail moves all the way left and right. The 5.6 can still be built with just one EV3 retail set (31313).
Program Update 1
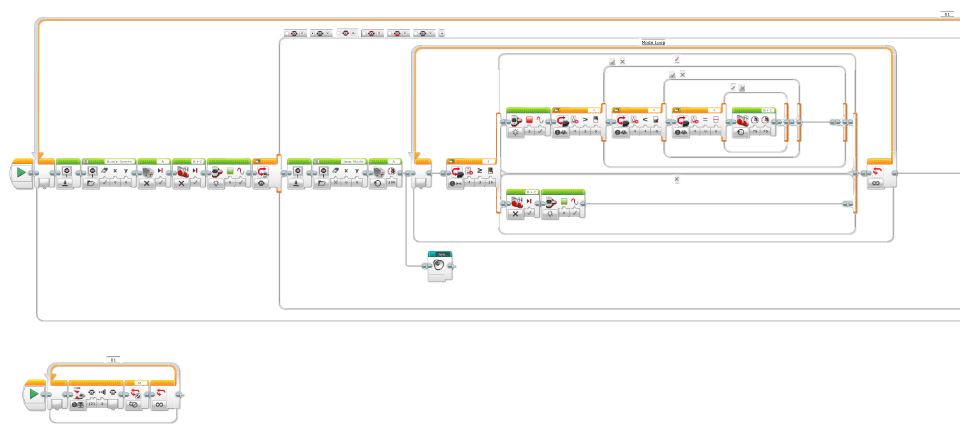
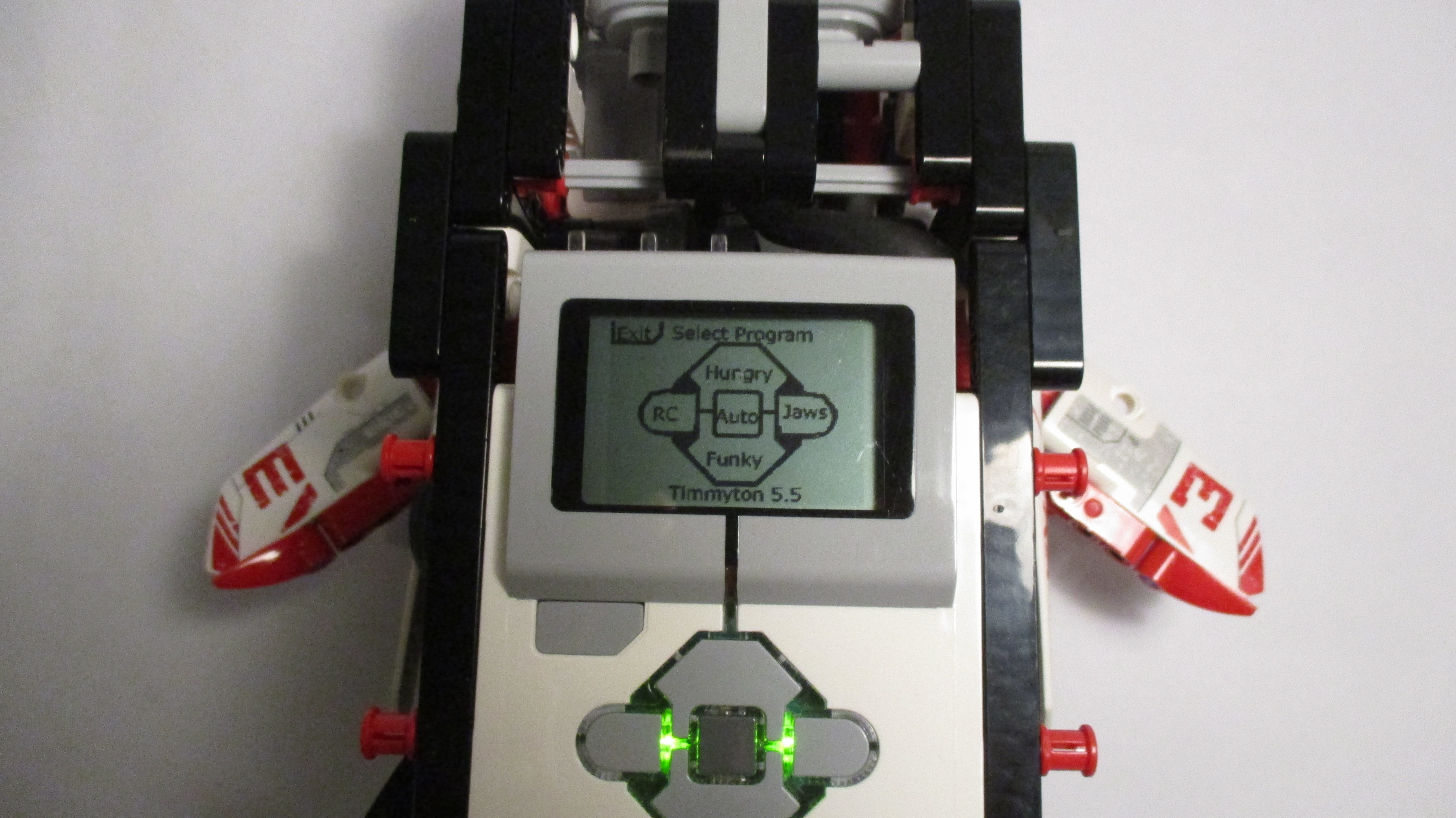
The majority o the updates are to the programming (pic 1). As DamonMM2000 pointed out in his review, the main problem with the T5.5’s program was exiting modes; as you may recall, all 5 of the Timmyton’s operating modes are accessed through a menu in the single program, and can be entered/exited without leaving the program. In the 5.5, exiting modes to go back to the Timmyton menu was sloppy, difficult and often didn’t work right. The reason for this was that some of the operating modes used multiple simultaneous loops, which all needed to be exited in order to exit the modes. So, the first thing that was done was the modes that used multiple loops were restructured to use one just loop (see the next step, Funky Mode for more on this). Next, all of the loop blocks within the modes were renamed to all have the same name; “Mode Loop.” Finally, a new parallel branch was added underneath the program; this is the interrupt case (pic 2). It constantly monitors the condition of the center brick button; if it is pressed, it will end all loops named “Mode Loop,” which ends all functions of that mode and returns to the menu. Now, the exiting of modes is easier, cleaner, requires just one button press and does not crash or accidentally select an unwanted mode, as in the T5.5. Thus, the 5.6 is now easier and more streamlined for anyone to operate.
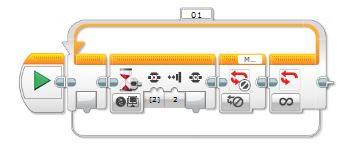
Program Update 2 (Funky Mode)
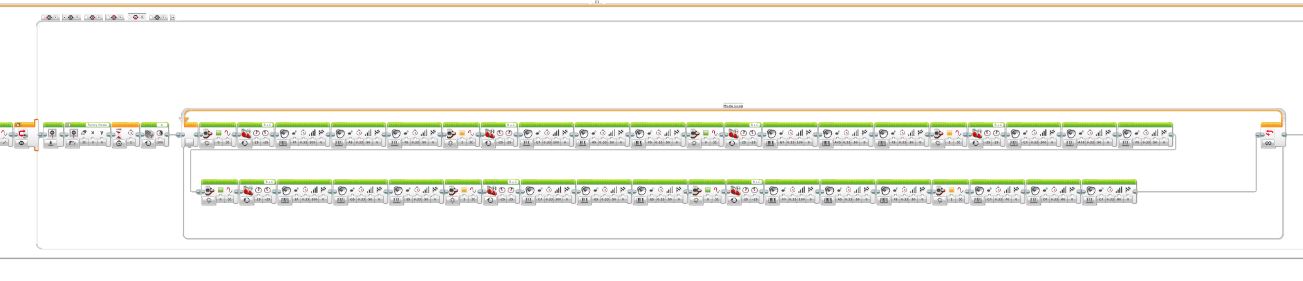
The second big change to the program was to Funky mode (pictured), in which the Timmyton plays its own music and dances. In the Timmyton 5.5, Funky mode used 3 parallel branches, each with its own loop, within the single mode. As mentioned previously, this was a disaster for exiting this mode and returning to the program, as all three loops needed to be ended simultaneously. So, Funky mode was restructured to use just one loop within the mode, which solves this problem. In addition, the Timmyton now plays better music. Previously, it simply played a “blip” sound file over and over again. Now, it plays its own custom waltz music and dances the waltz. It is a much better mode now!
Conclusion

At last, the Timmyton is now a totally polished, smooth running robot that no longer crashes and is easy for anyone to operate. Best of all, it’s still built with one EV3 set. Thanks to DamonMM2000 for your review of the 5.5 that helped make the 5.6 possible. I will be back sometime soon with an all new robot, so stay tuned! Thanks for reading!