


Hello, everyone! I am back with my latest NXT creation, the Omnilander. Read on to discover why it’s one of the greatest off-road MINDSTORMS vehicle ever!
See a video of Omnilander in action here: https://www.youtube.com/watch?v=S1-3vyYwzCk
Drivetrain
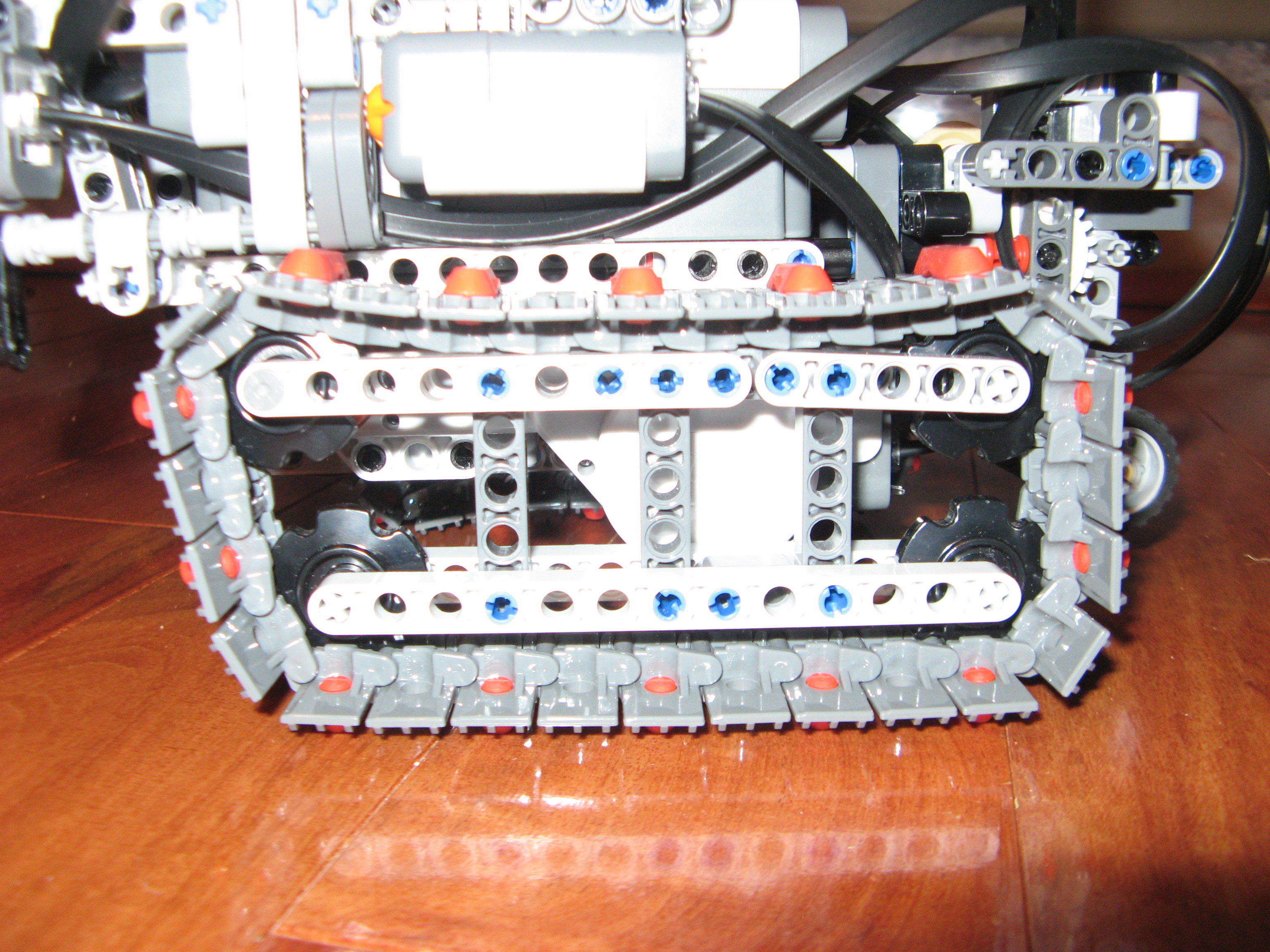
The Omnilander uses two NXT motors to propel itself in a tank-like fashion. It uses caterpillar tracks with trapezoid geometry to give it an upper hand on uneven ground. (The tracks have a slanted front to help it crawl over obstacles.) The red rubber grip inserts allow it to climb low-traction cardboard slopes that are up to 35+ degrees steep! The drivetrain also retains a fair amount of ground clearance.
Vertical Obstacle Scaling Hardware

The Omnilander can ascend virtually any slope under the Sun, but what happens when the obstacles become a bit more… vertical. Thanks to a few nifty mechanical components, the Omnilander is capable of scaling vertical obstacles that are up to 6.6 cm tall! (This may not sound like much until you consider that the whole vehicle from ground to the NXT brick is only 11 cm tall.) How is it able to do this? First, an EV3 Medium motor was attached to the side of the NXT. It routes its power to the front and back of the robot. A worm gear drives a 24 tooth gear attached to a lift claw in the front to pull the front up and onto the box. It is assisted by a rack-and-pinion lift jack in the back. Even though the jack is geared down, it still runs out of travel before the worm mech stops, so it has a clutch gear to allow the 13 module long rack to slip fully extended or retracted while the motor still spins. The robot uses the front lift claw and rear jack to pull itself onto the top of the box.
Sensors

The Omnilander has a total of three sensors; two NXT Touch and one HT IR Receiver. All of the sensors are on the left side of the robot. The two touch sensors are inline, but the one in back has a special mechanism that allows it to transmit any mechanical bumping to the sensor. The sensors are used to detect obstacles and determine if the obstacle is low enough to climb. If the top sensor (#1) is pressed, it will decide that the obstacle is too high and back away. If the bottom, or back, sensor is pressed (#2), it will try to climb the obstacle. The HT IR Receiver is for remote control, if you’re a control freak. The HT sensor has a protective casing to prevent it from being damaged in rollovers.
Program
The program is written in EV3-G and is a moderately complex autonomous program. A Switch block lets the Omnilander drive forward at 75% power until it bumps an obstacle with Touch Sensor #1. When this happens, it’ll make a 90 degree reverse right turn and loop the sequence again. However, a second branch of the program will interrupt this loop if Touch Sensor #2 is depressed.
Conclusion
The Omnilander is an extremely capable off-road vehicle. There is hardly any terrain it can’t tackle. Even my cousin compared it to a Mars rover when testing it. It could’ve had better programming with an HT Gyro or Compass Sensor, but since I don’t have either, this will suffice. I’m still extremely proud of this project, though. See you next time and thanks for reading!